📄 gs, gt: student and teacher networks¶
DINO:无监督知识蒸馏解锁视觉Transformer潜力分析¶
概要(TL;DR)¶
- 核心问题:视觉Transformer(ViT)在监督训练下未能展现超越卷积网络的独特优势,面临“合理性危机”。
- 关键洞察:将自监督学习重新定义为无标签的知识蒸馏,提出DINO框架,通过动量教师、多裁剪和中心化/锐化操作避免模型坍缩。
- 惊人发现:DINO训练出的ViT,其自注意力机制能够在无任何像素级标注的情况下,自发地学习分割图像中的物体。
- 卓越性能:在多项任务(如图像分类、检索、分割)上达到或超越前沿水平,且ViT-B/8模型以仅1/10的参数和更快的速度,实现了与巨型卷积网络相当的精度。
- 重要意义:首次清晰地证明了自监督学习能够释放ViT的架构潜力,为其在计算机视觉领域的应用提供了强有力的理由。
📚 研究背景与动机¶
卷积神经网络(CNN)统治计算机视觉领域近十年。视觉Transformer的出现曾带来巨大冲击,其基于自注意力的架构灵感源于自然语言处理的成功。然而,ViT初期的表现不尽如人意:计算成本高、数据需求量大,并且最关键的是,相比成熟的CNN并未展现出明确且独特的优势。
与此同时,自监督学习在计算机视觉领域蓬勃发展。其核心思想是让模型通过解决前置任务(如预测图像旋转、对比不同视图)来学习强大的、可迁移的特征表示,而无需人工标注。在NLP领域,正是自监督学习(如BERT的掩码语言建模)成就了Transformer的统治地位。这引出了一个关键问题:将自监督学习与ViT结合,能否解锁其潜在能力,并揭示监督训练无法获得的独特视觉特性?
论文表面探讨的是ViT的“初期表现平淡”,但其深层次意图是解决ViT在视觉领域的 “合理性危机” 。它是一个昂贵而复杂的方案,却缺乏令人信服的优势。作者假设,这种优势的缺失源于监督预训练范式本身。具体而言,图像级别的监督标签(如“狗”)是一种简化且信息贫乏的学习信号,无法充分捕获图像中丰富的结构信息(如物体部件、边界、场景布局)。本文旨在证明,当ViT通过自监督学习摆脱这种弱信号的束缚后,能够学到与监督训练本质不同且更有用的特征表示,从而证明其架构复杂性的价值。
此前工作的局限性体现在三方面: 1. 监督ViT:基本在复现CNN的功能,且效率更低,其特征并未展现出新颖的理想特性。 2. 面向CNN的自监督方法:虽强大,但通常依赖复杂的工程技巧(如大批次、内存库、预测头),其设计和评估围绕CNN展开,未必是激发ViT潜力的最优解。 3. 自监督中的知识蒸馏:以往工作仅将蒸馏用作模型压缩的后处理步骤,错失了将蒸馏框架本身作为动态自监督目标核心的机会。
🔬 方法详解¶
DINO的核心是将表示学习重构为一个无标签的知识蒸馏问题。其基本设定是:训练一个学生网络,使其输出分布与一个教师网络的输出分布相匹配。而教师网络是学生网络的动量更新版本。为防止输出坍缩(如全部输出相同或均匀分布),DINO引入了中心化和锐化操作。
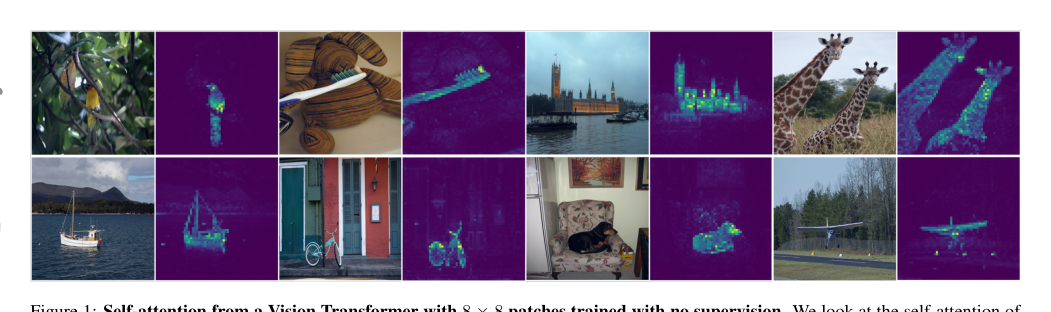
DINO训练出的ViT-S/8模型的[CLS]令牌自注意力图,展示了无监督下的类特定对象分割能力。
核心机制: 1. 网络结构与输出:学生和教师网络共享架构(ViT或ResNet),后接一个投影头(小MLP),输出一个K维向量(K为原型数量,如65,536)。通过温度系数τ控制的Softmax,将输出转换为概率分布: 学生分布:$\(P_s(x)^{(i)} = \frac{\exp\left(g_{\theta_s}(x)^{(i)} / \tau_s\right)}{\sum_{k=1}^K \exp\left(g_{\theta_s}(x)^{(k)} / \tau_s\right)}\)$ 教师分布(含中心化与锐化):$\(P_t(x)^{(i)} = \frac{\exp\left(\left(g_{\theta_t}(x)^{(i)} - c\right) / \tau_t\right)}{\sum_{k=1}^K \exp\left(\left(g_{\theta_t}(x)^{(k)} - c\right) / \tau_t\right)}\)$ 其中,\(c\)是一个动态更新的中心向量(运行平均值),用于防止某个原型独大;\(\tau_t < \tau_s\) 使教师分布更“尖锐”,为学生提供明确的学习目标。
-
动量更新:教师参数\(\theta_t\)通过指数移动平均(EMA)随学生参数\(\theta_s\)缓慢更新:$\(\theta_t \leftarrow \lambda \theta_t + (1 - \lambda) \theta_s\)$。这为训练提供了稳定目标。
-
损失函数与多裁剪:损失是教师视图(仅全局裁剪)与学生视图(全局+多个局部裁剪)之间的交叉熵损失之和: $\(\mathcal{L} = \sum_{x \in \mathcal{V}_s} \sum_{x' \in \mathcal{V}_t} H\left(P_t(x'), P_s(x)\right)\)$ 多裁剪策略强制模型学习从局部到全局的视图不变性,是性能提升的关键。
-
避免坍缩的分析:交叉熵损失可分解为教师分布熵\(h(P_t)\)和师生分布的KL散度\(D_{\text{KL}}(P_t \| P_s)\)。中心化防止熵过低(单一原型主导),锐化防止熵过高(均匀分布),两者共同维持一个信息丰富的学习过程。
为何ViT与DINO协同效应显著? DINO框架与ViT的架构特性产生了奇妙的化学反应。通过匹配不同裁剪视图的输出,DINO的训练目标鼓励ViT的自注意力机制去捕获图像中跨视图一致的语义结构。这导致了一个涌现特性:ViT的[CLS]令牌在最后一层的自注意力图,会高度聚焦于图像中的主要物体边界,实现了无监督语义分割。
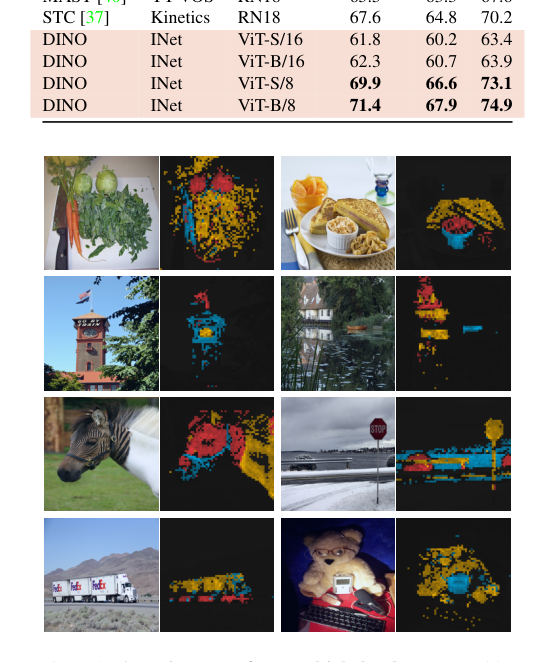
ViT-S/8最后一个层中不同注意力头(以不同颜色表示)的[CLS]令牌注意力图,显示不同头专注于不同物体或部件。
📊 实验验证¶
实验在ImageNet等多个数据集上进行,评估涵盖分类(线性探测、k-NN)、图像检索、复制检测、视频分割和迁移学习。
主要结果: 1. ImageNet分类(ViT-S):DINO显著优于其他自监督方法。在线性评估和k-NN评估上分别达到77.0% 和74.5% 的Top-1准确率,较BYOL、MoCov2、SwAV等基线高出3.5-5.6%(线性)和7.9-10.1%(k-NN)。k-NN性能接近线性分类器,表明其特征质量极高。
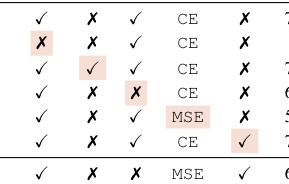
消融研究表,展示了动量编码器、多裁剪、交叉熵损失等组件的重要性。
-
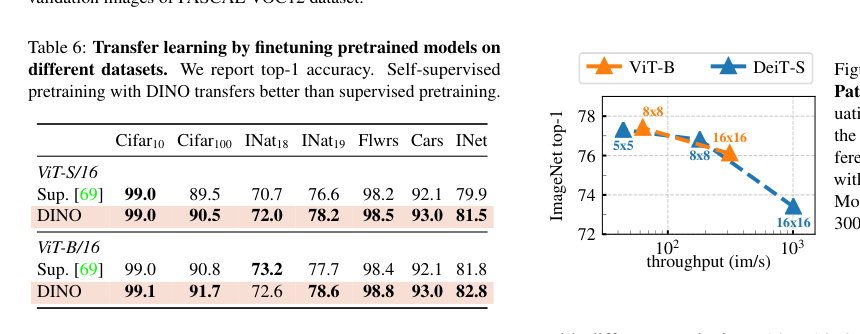
跨架构效率突破:DINO训练出的ViT-B/8模型仅用8500万参数,在线性评估上达到80.1% 的SOTA水平,同时吞吐量为63 im/s。相比之下,此前基于卷积网络的SOTA方法SCLRv2(RN152w3+SK)需要7.94亿参数,吞吐量46 im/s,精度为79.8%。DINO实现了约10倍的参数压缩和1.4倍的速度提升。
-
下游任务优势:
- 图像检索与复制检测:在Google Landmarks等数据集上,DINO ViT模型超越了专门为检索设计的监督模型。
- 无监督分割:在PASCAL VOC上,DINO ViT自注意力图与真实掩码的Jaccard相似度远超监督训练的ViT。
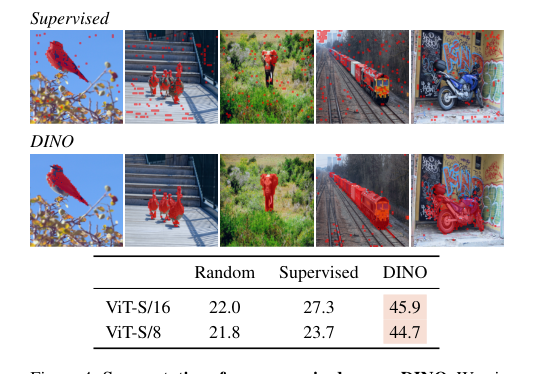
监督ViT与DINO ViT的自注意力分割掩码对比,以及它们在PASCAL VOC上的Jaccard相似度定量比较。
- 消融研究与分析:
- 关键组件:动量编码器、多裁剪策略和交叉熵损失对性能至关重要。移除多裁剪会导致线性准确率下降4.2%。
- 训练效率:多裁剪提供了更好的精度-时间权衡,能以更短时间达到更高精度。
- 注意力特性:如Figure_1和Figure_3所示,DINO训练出的ViT注意力头具有高度语义性,能够分离不同物体或物体部件。
不同组件(损失函数、多裁剪等)消融实验的示意图或结果摘要。
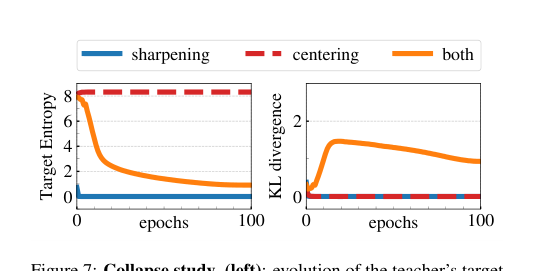
训练过程中教师目标熵和KL散度的演变,展示了DINO如何避免模型坍缩。
潜在局限性与注意事项(基于数据审计): 1. 统计报告不足:论文未提供多次运行结果的标准差,难以精确评估改进的统计显著性。 2. 比较公平性:部分跨架构比较的训练周期(300 vs 800 epoch)不完全对等;ViT固有的注意力机制可能在某些任务(如分割)上自带优势。 3. 计算需求:训练ViT-B/8需3天(16块V100 GPU),计算成本依然较高。 4. 超参数敏感性:中心化和锐化操作需要精细调参以维持训练稳定性。
💡 核心要点¶
- 范式验证:本工作成功验证了核心假设——自监督学习是释放视觉Transformer潜力的关键。监督训练的“贫乏信号”掩盖了ViT的架构优势。
- 框架创新:提出了DINO,一个简洁而强大的自监督学习框架。它将任务重构为无标签知识蒸馏,摒弃了许多复杂组件,显示了出色的通用性和有效性。
- 涌现特性:DINO与ViT结合催生了前所未有的特性——无需任何像素监督的自发语义分割能力。这表明模型学习到了深层的场景结构理解。
- 效率与性能的平衡:DINO训练出的ViT模型,在参数效率和推理速度上显著优于庞大的自监督卷积网络,同时在分类、检索等多个基准上达到领先水平,为ViT的实际部署提供了有力论据。
- 基础性贡献:这项工作不仅是一个强大的自监督方法,更从根本上为Vision Transformer在计算机视觉领域的地位正名,指明了其独特优势所在。
🔮 未来方向与局限性¶
未来方向: * 理论深化:进一步从理论上解释为何DINO框架能引导ViT注意力产生语义分割图。 * 架构探索:将DINO框架与更先进的ViT变体(如Swin Transformer)结合,探索其边界。 * 多模态扩展:借鉴DINO的思想,探索视觉-语言统一模型的自监督预训练。 * 轻量化:进一步降低训练和部署的计算成本。
局限性: * 如实验部分所述,结果的统计稳健性有待进一步量化报告。 * 尽管效率已有突破,但训练大规模ViT模型仍需要可观的算力资源。 * 自注意力分割的质量虽高,但尚未达到实用级分割系统的精度,如何利用这一特性改进下游密集预测任务仍需探索。