📄 Detection Transformer with Stable Matching¶
Stable-DINO:基于位置监督损失的DETR稳定匹配方法分析¶
概要(TL;DR)¶
- 核心问题:DETR类模型中的一对一匈牙利匹配策略存在“多优化路径问题”,导致训练不稳定和收敛缓慢。
- 解决方案:提出位置监督损失,仅使用位置度量(如IoU)来监督分类分数,消除优化冲突;并引入位置调制匹配成本和内存融合技术以加速收敛。
- 关键成果:在COCO基准上,Stable-DINO将DINO的AP提升了1.4个百分点(ResNet-50),且收敛速度显著加快,代码已开源。
📚 研究背景与动机¶
目标检测是计算机视觉的基础任务。以CNN为主的传统方法依赖锚框、非极大值抑制等手工组件。Detection Transformer (DETR) 的提出带来了革命,它利用Transformer架构和匈牙利匹配,实现了端到端的集合预测,消除了手工设计。然而,DETR也带来了新挑战,主要是收敛速度慢和性能欠佳。
后续研究(如Deformable DETR, DINO)通过可变形注意力、查询锚点、去噪辅助任务等技术改善了收敛性,但都未触及一个根本性问题:一对一匈牙利匹配策略内在的训练不稳定性。
本文指出,这种不稳定性的根源在于 “多优化路径问题” 。当两个不完美的预测(一个定位准但分类分数低,另一个定位差但分类分数高)竞争同一个真实目标时,标准匹配和损失函数会产生相互冲突的监督信号。模型会根据随机匹配到的预测,走上两条截然不同的优化路径,导致训练不一致且低效。
先前工作的局限在于,它们要么忽略了此问题,要么只是间接处理(如DN-DETR通过去噪任务),而缺乏对损失函数本身的原则性分析和修改。
本文的关键洞见是:在端到端的一对一匹配框架下,要确保训练稳定高效,正样本的分类分数必须仅由其定位精度(如IoU)来监督,而不能由其自身预测的分类分数来监督。这打破了循环依赖,消除了冲突路径,使DETR的优化目标与传统检测器(先基于位置选择正样本)重新对齐。
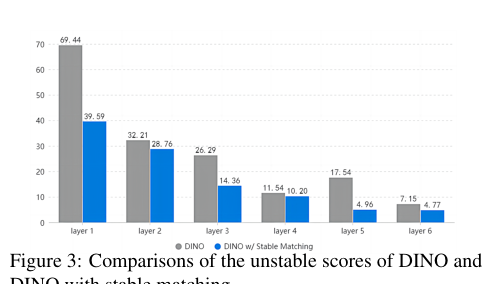
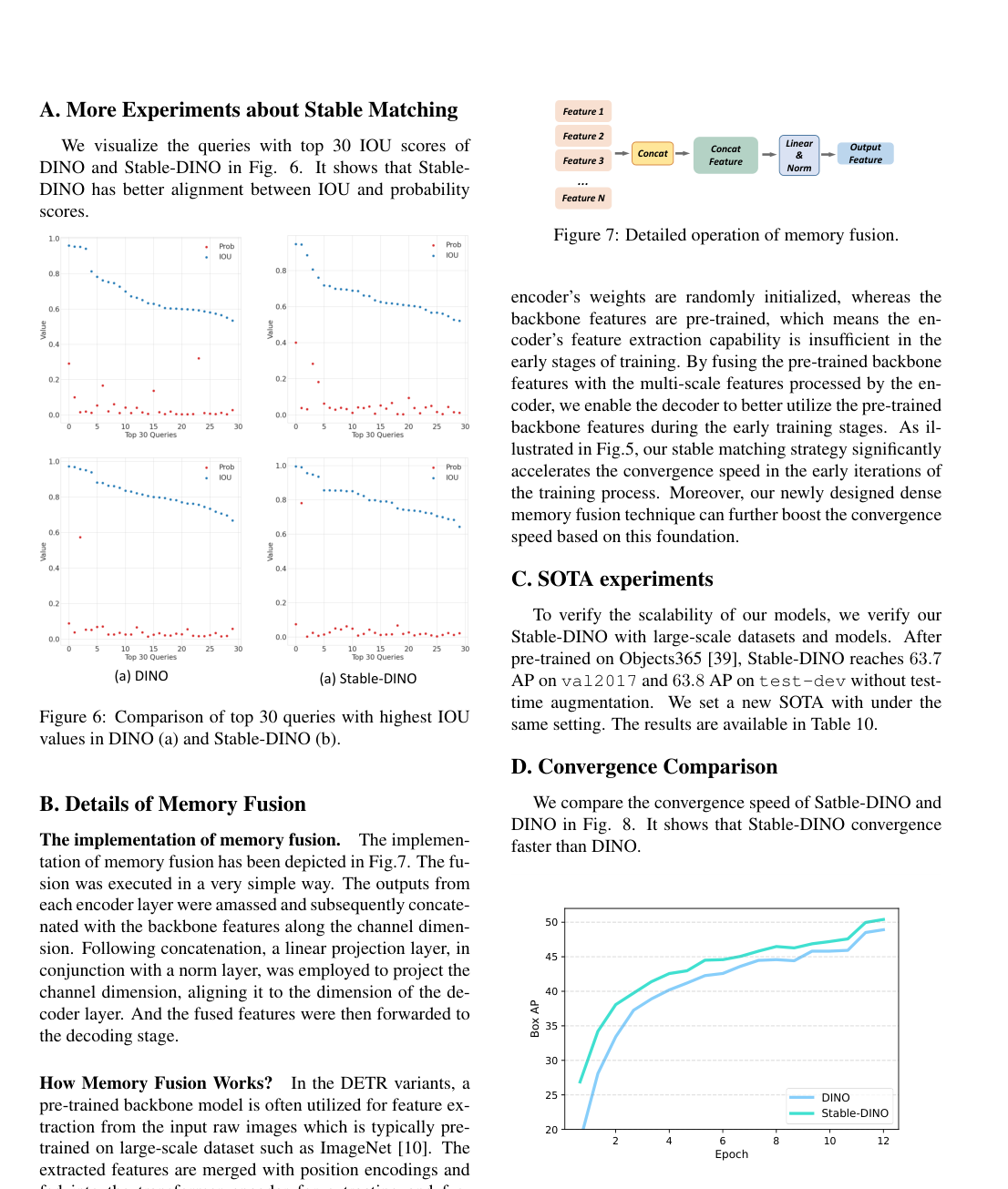
直观展示DINO与Stable-DINO在匹配稳定性上的对比
🔬 方法详解¶
Stable-DINO的核心是重新设计分类损失和匹配成本,以解决多优化路径问题。
1. 位置监督损失¶
传统DETR的分类损失(Focal Loss)强制所有正样本的分类分数趋近于1: $$ L_{\text{cls}} = \sum_{i=1}^{N_{\text{pos}}} |1 - p_i|^\gamma \text{BCE}(p_i, 1) + \sum_{i=1}^{N_{\text{neg}}} p_i^\gamma \text{BCE}(p_i, 0) $$ 其中 \(p_i\) 是预测的分类概率。
位置监督损失 则用位置度量 \(s_i\)(如IoU)的函数 \(f_1(s_i)\) 来替代固定目标“1”: $$ L_{\text{cls}}^{\text{(new)}} = \sum_{i=1}^{N_{\text{pos}}} \left(|f_1(s_i) - p_i|^\gamma \text{BCE}(p_i, f_1(s_i))\right) + \sum_{i=1}^{N_{\text{neg}}} p_i^\gamma \text{BCE}(p_i, 0) $$ 这里 \(f_1(s) = \varepsilon(s^2)\),是一个凸函数变换。其物理意义是:一个预测的分类目标值应与其定位质量成正比(高IoU则目标值高),而非盲目追求1.0。
2. 位置调制匹配成本¶
在匈牙利匹配阶段,匹配成本决定了预测与真实目标的对应关系。标准分类匹配成本为: $$ C_{\text{cls}}(i, j) = |1 - p_i|^\gamma \text{BCE}(p_i, 1) - p_i^\gamma \text{BCE}(1-p_i, 1) $$ 位置调制匹配成本 将原始分类分数 \(p_i\) 用位置质量 \(s_i'\)(调整后的GIoU)进行调制: $$ C_{\text{cls}}^{\text{(new)}}(i, j) = |1 - p_i f_2(s_i')|^\gamma \text{BCE}(p_i f_2(s_i'), 1) - (p_i f_2(s_i'))^\gamma \text{BCE}(1 - p_i f_2(s_i'), 1) $$ 其中 \(f_2(s) = s^{0.5}\)。其作用是降低定位差的预测在匹配中的竞争力,促使匹配结果更倾向于定位准确的预测。
3. 内存融合¶
为了加速早期收敛,论文提出了特征层面的内存融合技术。由于Transformer编码器是随机初始化的,而主干网络是预训练的,早期训练时编码器特征质量不高。内存融合将主干网络提取的丰富特征与编码器输出进行融合,使解码器能立即利用预训练特征。
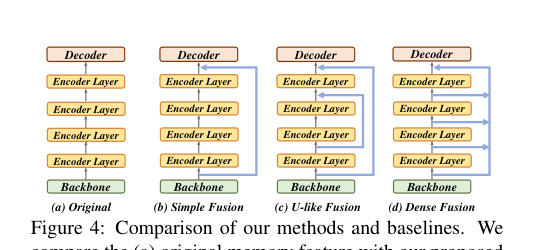
展示三种内存融合策略:(a)原始,(b)简单融合,(c)U型融合,(d)密集融合
三种融合方式(简单、U型、密集)均通过拼接和线性投影实现,不引入额外参数。实验表明,密集融合效果最佳。
📊 实验验证¶
实验在COCO 2017等标准数据集上进行,以平均精度(AP)为主要评价指标。
主要结果¶
在ResNet-50主干网络上(12轮训练): - DINO-4scale基线:49.0 AP - Stable-DINO-4scale:50.4 AP (+1.4 AP) - Stable-DINO-5scale:50.5 AP (+1.1 AP)
在更大的Swin-L主干网络上(12轮训练): - DINO-4scale基线:56.8 AP - Stable-DINO-4scale:57.7 AP (+0.9 AP)
提升幅度在目标检测领域被认为是显著且具有实际意义的。
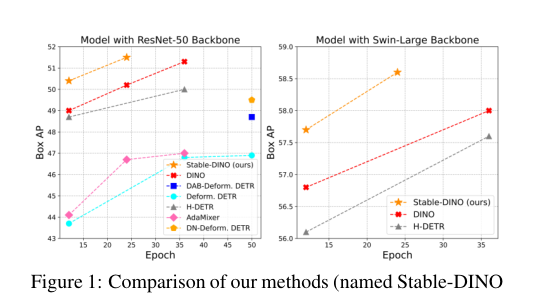
展示Stable-DINO与多种基线方法在ResNet-50和Swin-L主干上的性能对比
消融实验¶
各组件贡献如下(基于ResNet-50): 1. DINO基线:49.0 AP 2. + NMS (0.8):49.2 AP (+0.2) 3. + 位置监督损失:49.8 AP (+0.6) 4. + 位置调制匹配成本:50.2 AP (+0.4) 5. + 密集内存融合:50.4 AP (+0.2)
位置监督损失是性能提升的最主要贡献者。
收敛速度分析¶
Stable-DINO,尤其是结合了密集内存融合后,展现出更快的收敛速度。在训练早期,其性能提升明显快于原始DINO。
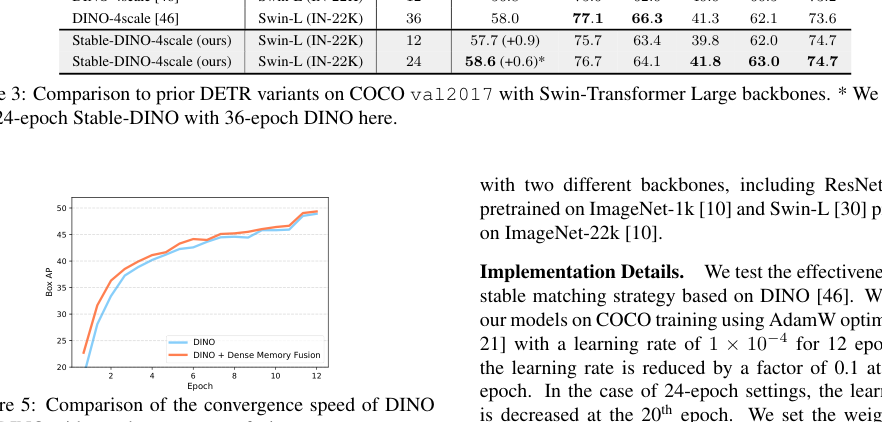
对比DINO与加入密集内存融合的DINO的收敛曲线
对比DINO与Stable-DINO的收敛速度
泛化性验证¶
方法在多种DETR变体(Deformable-DETR, DAB-Deformable-DETR, H-DETR, MaskDINO)上均取得一致提升(+0.6 至 +1.3 AP),证明了其通用性。
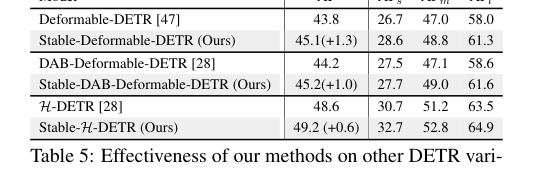
展示方法在其他DETR变体上的有效性
可复现性评估¶
- 代码:已在GitHub开源 (
https://github.com/IDEA-Research/Stable-DINO)。 - 框架:基于detrex开发。
- 超参数:学习率、随机种子(60)、损失权重等关键参数已明确给出。
- 风险点:批次大小、具体硬件需求等细节未在论文中说明,需参考代码实现。
总体可复现性评分:中等偏高(7/10)。
💡 核心要点¶
- 直击根本:首次明确并系统解决了DETR类模型因一对一匹配导致的“多优化路径”训练不稳定问题。
- 简洁有效:核心修改(位置监督损失)概念清晰、实现简单,无需复杂结构改动,却能带来显著性能提升。
- 加速收敛:提出的内存融合技术有效利用了预训练主干特征,大幅加快了模型训练早期的收敛过程。
- 通用性强:方法不依赖于特定架构,在多种DETR变体上均验证有效,具有良好的可迁移性。
- 开源可复现:论文提供了完整的代码实现和关键训练细节,为社区研究和应用提供了便利。
🔮 未来方向与局限性¶
局限性: 1. 实验细节缺失:论文未报告批量大小、GPU需求、训练时间等工程细节,也未提供多次运行结果的方差,统计严谨性可进一步加强。 2. 比较公平性:部分对比实验中,Stable-DINO使用了NMS(贡献+0.2 AP)或训练轮数不同,需注意对比条件。 3. 理论深度:方法虽有效,但理论分析相对直观,更深入的收敛性理论证明是未来的方向。 4. 范围限定:方法主要针对DETR家族模型,其思想与传统检测器的结合潜力有待探索。
未来方向: 1. 理论拓展:为位置监督损失提供更严格的理论收敛性保证。 2. 跨范式应用:探索将“基于位置监督分类”的思想应用于其他存在匹配冲突的视觉任务,如实例分割、姿态估计。 3. 效率优化:进一步研究更高效的特征融合方式,或探索在训练后期动态关闭融合以降低计算开销。 4. 损失函数设计:研究更优的变换函数 \(f_1\), \(f_2\),或将其设计为可学习的模块,以适应不同数据集和任务。